


It is strongly recommended to start with Hexapod v2 rather than building Hexapod v1. Our experience has shown that MG90S servos used in Hexapod v1 frequently fail due to their inherent weaknesses and inconsistencies in quality.
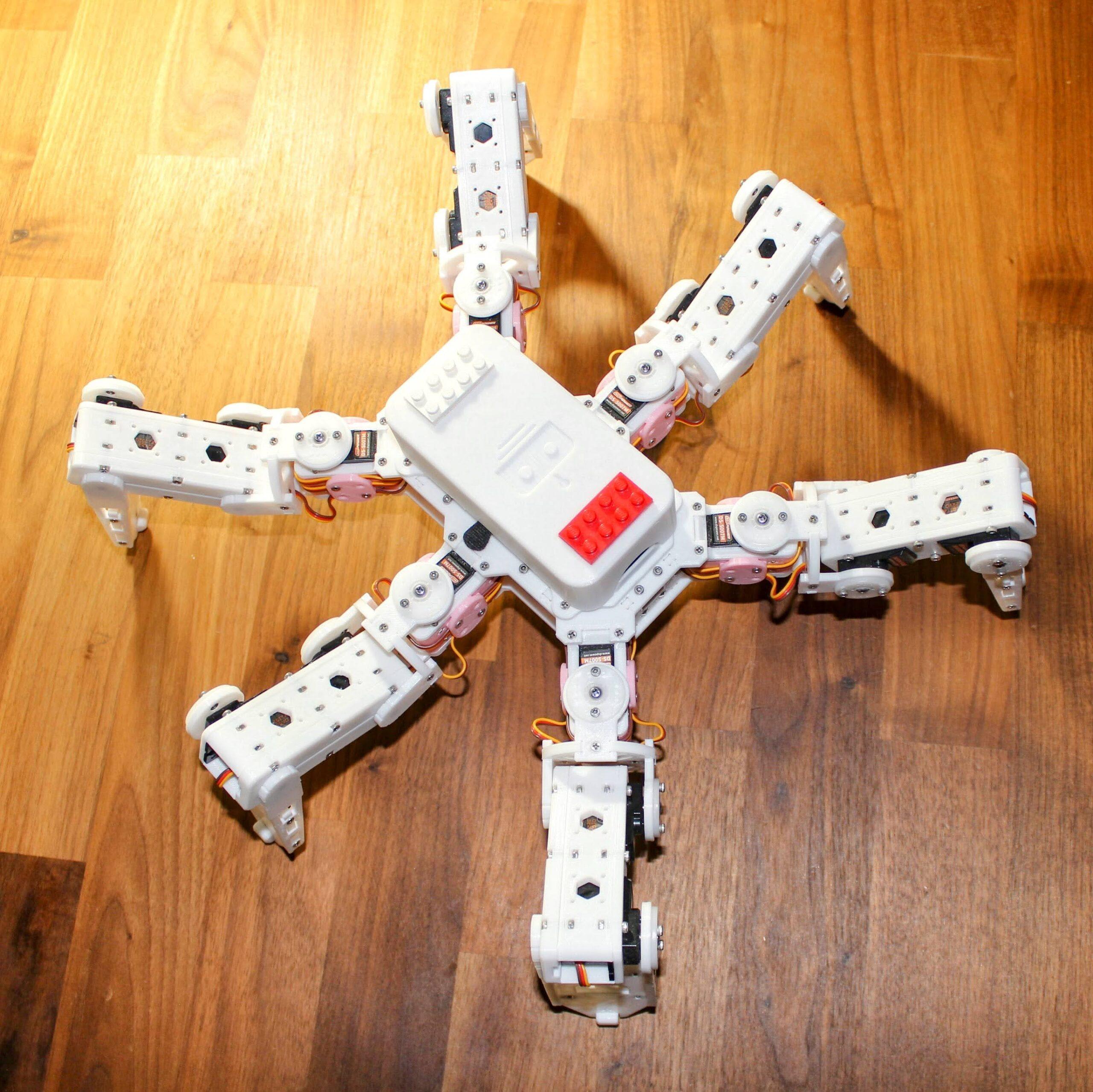
The Hexapod v2’s 3D-printed design prioritizes structural integrity and durability, ensuring the robot can handle dynamic movements without compromising strength. Key design considerations include:
- Optimized Layer Orientation: The model is strategically designed to avoid layers being perpendicular to critical loads. This enhances strength by ensuring that stress is distributed along the length of the printed layers rather than across them, reducing the risk of delamination.
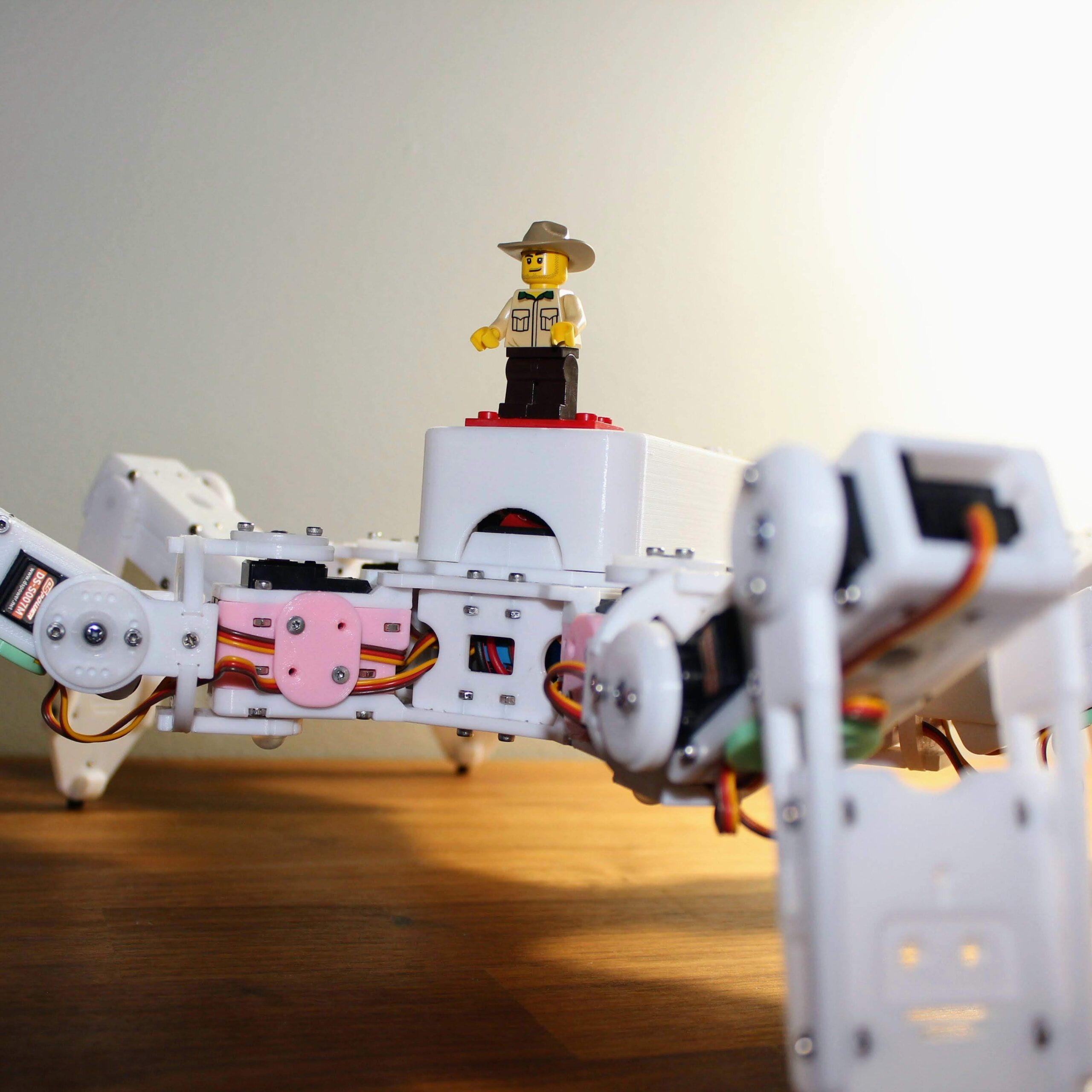
- Reinforced Joints & Mounts: The leg segments and servo mounts feature reinforced connection points, preventing stress concentrations and improving load distribution.
- Compact & Sturdy Frame: The body and leg components are structured to balance weight and rigidity, ensuring a stable platform for locomotion while keeping the overall weight manageable for efficient servo operation.
- Interlocking & Modular Design: The components are designed to interlock or securely fasten together, reducing reliance on adhesives and improving the overall integrity of the assembly.
- Material Choice Considerations: Thanks to its optimized design, this robot performs well even with basic 3D printing materials like PLA, while still maintaining strength and durability.
These design choices contribute to a durable and reliable hexapod robot that can withstand repeated use and movement stresses.




Reviews
There are no reviews yet