

🛠️Build Instructions↗ Full Guide🖨️3D Print Files⬇️ Free Download⚡ESP32 Controller🛒 Shop Part💻Software Bundle⬇️ Free Download
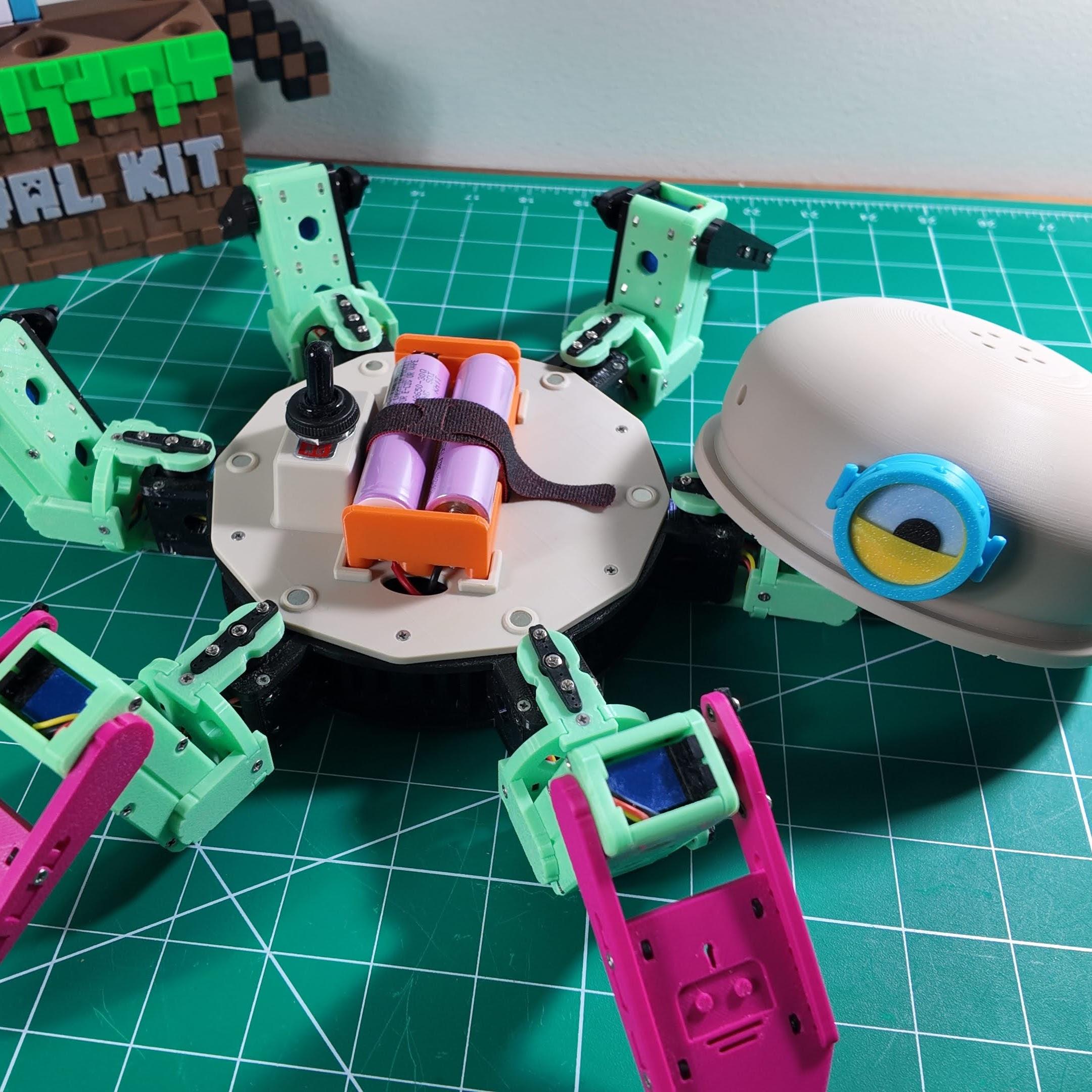
Hexapod Mochi is a six-legged, WiFi-enabled walking robot with 18 degrees of freedom. This listing includes the complete set of 3D-printable model files for the Mochi chassis — designed over three generations to get the geometry, joint strength, and servo fit exactly right. Print it, assemble it, make it walk.
Key Specs
- Legs / DOF: 6 legs · 18 degrees of freedom
- Servos: MG92B — highest-torque micro servo that still fits a compact body
- Microcontroller: ESP32 (built-in WiFi access point)
- Control: WiFi UDP · Android app (point-and-go)
- Firmware: Over-the-air (OTA) updates
- Materials: PLA or PETG — standard desktop 3D printer friendly
- Chassis: Circular frame for even load distribution and symmetric gait
What’s Included
- All printable parts for the Mochi chassis (body, legs, servo mounts, covers)
- STL and source files ready for standard desktop FDM printers
- Compatible with PLA or PETG — no exotic materials needed
Designed to Last
Every structural decision in Mochi was deliberate:
- Layer orientation — print layers align with load directions to prevent delamination under walking forces.
- Reinforced joints — servo mounts and leg segments spread loads to minimise stress concentrations.
- Circular frame — optimises the weight-to-rigidity ratio and distributes servo loads evenly across all six legs.
- Modular assembly — interlocking parts reduce adhesive dependency; repairs and upgrades need no specialised tools.
Built to Teach
Mochi is a platform, not just a model. Once printed and assembled it becomes a working robot that teaches real skills: electronics, ESP32 programming, gait mathematics, and WiFi control — all documented step by step on the RookiDroid site.
Three generations of iteration. One set of files. Print it and make it walk.



Reviews
There are no reviews yet